- Home » News » Technology News

New link modules can create twin-armed modular robots

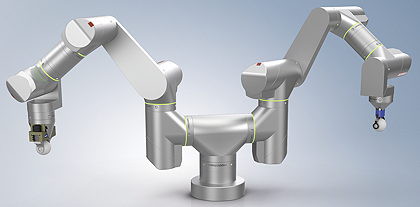
Beckhoff has enhanced the flexibility of its Atro modular robotic system by introducing new link modules that open up new possible topologies, including multi-arm robots. It unveiled the new modules at the Automatica show in Germany where it demonstrated a T-shaped link module with two junctions being used to create a two-armed robot with four motor modules – or joints – in each of the arms. There are also L- and S-shaped link modules.
The common main axis in the two-arm robot can rotate continuously and thus act as a moving base for the robot. All of the axes in the Atro (automation technology for robotics) system, from the base to the end-effectors, can rotate endlessly because media such as power, pneumatics and communications are fed internally through the modules, rather than externally.
The system, launched in 2022, has drives built into each of its axes. These are combined with link modules to create a variety of geometries, giving the flexibility to set up robot kinematics that are optimised for an application.
In the two-armed robot, the arms can be guided simultaneously to different work areas where they can grip, set down or machine workpieces. This structure is said to be fast and efficient, as well as saving space. It eliminates the need for the robot to perform the usual return travel during which no processes are executed.
The compressed air or power supply to the two end grippers is routed internally from the main axis to the end-effectors via the modules’ Atro interfaces.
The new L- and S-shaped link modules support kinematics with four degrees of freedom, which could be used for tasks such as palletising.
Axes based on the new L-shaped link modules cannot collide with themselves, allowing the endless rotation of the axes to be exploited. In other configurations, self-collisions are avoided using software.
The arms are controlled using robot controls built into Beckhoff’s TwinCat platform, which can supervise a complete machine.
It is also possible to achieve a compact control system that does not need a cabinet using Beckhoff’s modular MX-System which consists of an industrial PC, a power supply, digital I/Os and safety modules. The robot receives its 48V power supply and EtherCat communication via a single hybrid cable from the power supply which has a 40A output. Beckhoff has recently added pneumatic modules to the MX-System which can be used to control end-effectors.
Beckhoff Automation: Twitter LinkedIn Facebook