Switching into safety engineering - Distinguishing normal switches and safety switches
The first article in this series covered the philosophy behind safe machinery and the role that the various types of safety switches and devices can provide. This second article in a series of six covers the key design principles and differences between normal switches and safety switches and provides an overview of the technologies which can be adopted, both conventional and modern.
The purpose of all switches used in safety systems is to interrupt the safety circuit when necessary. Selection of the correct safety device for any given application is a major engineering decision, one which quite literally can result in life or death.
Guarding safety switches are used to monitor gates and doors, as well as any other movable physical guards. They operate by sending a signal to a machine’s control system if a guard has been opened, removed or is out of alignment. In addition, process control elements can also have a safety implication such as pressure or flow.
The most well-known and probably the simplest example of a safety-switch is the emergency stop button, which ensures that relevant parts of the installation are safely shut down.
Safety switches come in many differing forms to suit the demands of the designer and it is important the right technology is used for any particular application. This includes non-contact types, based on coding and transponder, or mechanical switches with or without door-locking.
Although the popularity of the electronic-based ‘coded’ type switches is growing, mechanical varieties using physical contacts instead of failsafe-semiconductors are still extremely popular in machinery design.
In many cases, the safety variants look very similar to the standard devices. At first glance, the standard units look suitable, having the much needed, normally closed contacts required by the evaluation devices. But the technology inside the two differs markedly. The main differences are shown in Table 1.

Table 1: Main differences between standard switches and safety switches with physical contacts
Electromechanical switching elements
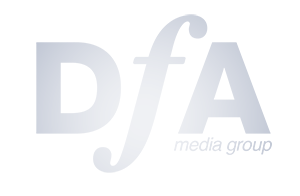
In a simple electromechanical switch, the key element comprises a plunger with at least one contact bridge in a housing. The contact bridge forms the connection between the contacts. It is used as either a normally open contact (Fig 1), where contacts are closed on the actuation of the switch); or a normally closed contact, where contacts are opened on the actuation of the switch. The switching elements have a spring for resetting after actuation. The spring force acts against the actuating force applied externally to the plunger and determines how much pressure is needed to operate the switch.
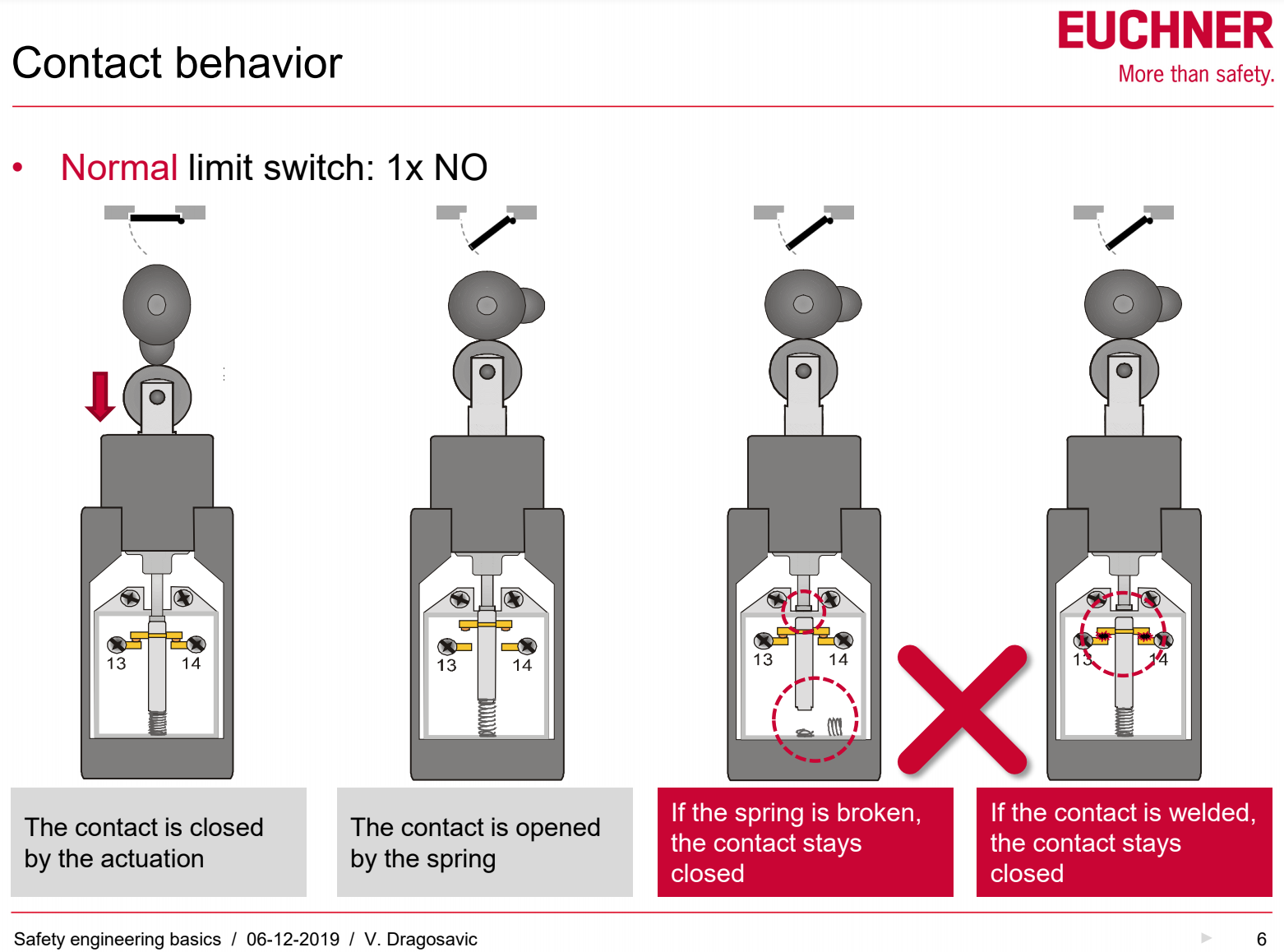
Fig 1: A normally open position switch which remains closed (fail) if the spring is broken or the contacts weld.
If the plunger is pressed down by an external actuating force (such as when a pallet arrives at a station), the normally open contact closes. A signal can then be transferred to the machine control system to tell it to do something. As soon as the external force is no longer acting on the plunger, the contact bridge is moved away again by the spring force and the contact is opened again.
For safety applications it is vital that the switching element must function effectively, even when there is a fault. Typical faults include welding of the contacts due to overcurrent or fracture of the spring over time. If one of these faults occurs, the switch's contact bridge position cannot be determined and therefore the switch could continue to give a healthy signal back to the control system.
This switching principle therefore does not guarantee safe interruption of the actual circuit in all situations. For this reason, switching elements with at least one positively driven contact are used for safety switches (Fig 2).
Fig 2: A safety limit switch with positive opening operation - the contact is open if the spring breaks or the contacts weld.
In principle, position switches with positively driven, normally closed contacts - the result of a rigid connection between the plunger and contact bridge - have the same design as switches with standard design, normally open contacts. However, opening of the switching contacts is positively driven by the plunger. Springs and clips are no longer relied upon, so even if the spring breaks or the contacts weld together, the physical force of depressing the plunger guarantees that the safety contacts will open.
The principle of operation is shown in Fig 2: on the actuation of the plunger, the normally closed contact is positively driven over the entire actuating travel. If the external force is no longer acting on the plunger, the contacts are closed again by the spring.
Even if the contacts weld together, the related contact is opened safely because the external forces are transferred via the rigid mechanical joint. If the spring is broken, the contact is not closed again. The contact bridge remains in the safe, open position.
Tongue-type actuators
Mechanical switches using a tongue-type actuator are universally common. They use the same principle as discussed above, but with one major difference – the switch has to convert the negative action of ‘pulling-out’ the actuating tongue from the switch into a positive action of physically breaking the safety contacts. It does this via a well-engineered assembly within the head of the switch. When the tongue type actuator is removed from the switch, such as upon opening a guard door, it forces the normally closed contacts to open.
Slow-action contact elements
A primary characteristic of mechanical safety switches is their use of slow-action contact elements. Here, the speed and travel of the contact bridge movement is the same as the speed of the actuation, because they are directly linked. The actuating travel is therefore transferred evenly to the contact bridge.
Due to the simple design of slow-action contact elements, various safety and signalling contact combinations can be accommodated in very small housings. This is one reason why they are often installed in safety switches.
Design variations
There are many variants on the basic concept of the safety switch, suitable for many different circumstances. These are covered in depth in the Euchner Safety Book (pages 23-79) to which readers are referred. In reality, to comply with the strict requirements on machinery safety, modern safety circuits are mostly of dual-channel design. This design requires two positively driven contacts, either within one body or as two separate switches. Switching elements with multiple contacts do not have just one normally closed contact or normally open contact, but instead they have two or more contacts (Fig 3). Additional contacts may be included for further machine control functions. These requirements lead to an array of options featuring switching elements with different contact assemblies.
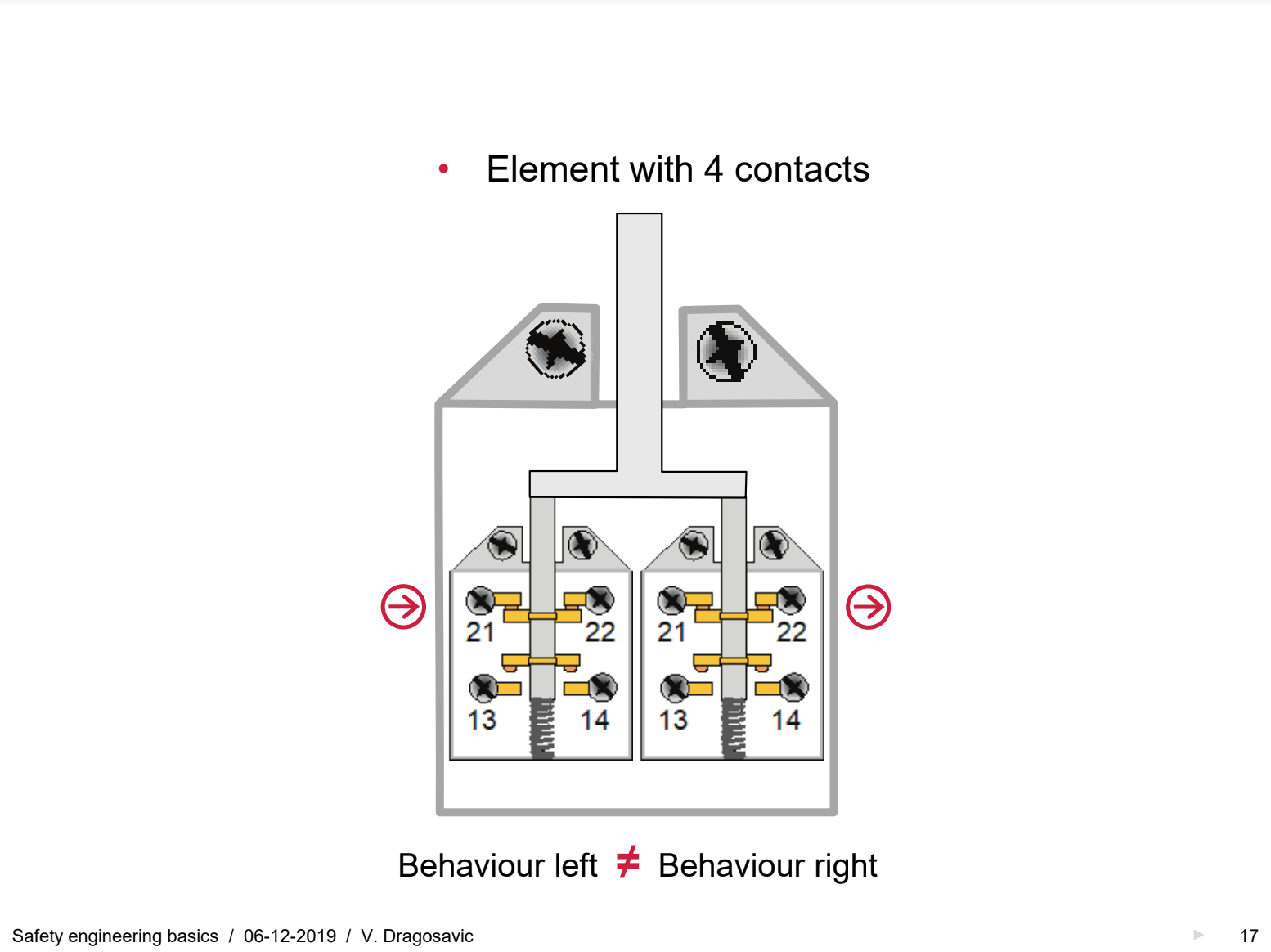
Fig 3: A switching element with four contacts.
Furthermore, modern electronic controls can feature dynamic signal transmission and signal processing with fault detection. This makes it possible to implement a purely electronically controlled shutdown that is just as safe as positively driven contacts. These new technologies will be covered in greater depth later in the series.