- Home » News » Technology News

Octopus tentacles inspire pneumatic gripper

A robotic gripper system with suction pads like those of an octopus is one of several pneumatically-powered robotic concepts that Festo will unveil at the Hannover Fair later this month. It will also be showing a collaborative robot arm with seven axes controlled pneumatically rather than using conventional servomotors, and a lightweight robot inspired by an elephant’s trunk.
These are the latest examples of Festo’s menagerie of biologically-derived mechanisms that draw crowds to the company’s Hannover stand every year. The OctopusGripper, developed in collaboration with students in China, consists of a soft silicone structure that is controlled pneumatically. When compressed air is applied, the tentacle bends inwards and can wrap gently around an object, adapting to its shape. Two rows of suction cups on the inside of the tentacle allow the gripper to hold a variety of different-shaped objects.
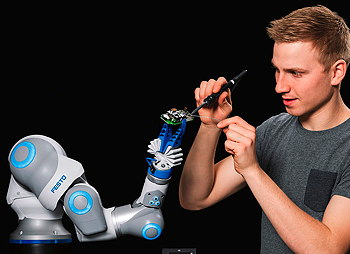
The second new technology is a lightweight collaborative robotic arm, modelled on a human arm from the shoulder to the hand, with seven joints that are operated using pneumatic “muscles” that expand and contract like human biceps and triceps. The BionicCobot’s delicate movements can be finely regulated to be either powerful and dynamic, or sensitive and yielding.
In each joint there is a simple, lightweight rotary vane motor with two chambers that work either with or against each other to achieve the required movements. The robot can lift loads of 1.5–2kg and is said to be accurate to within 1mm. It is operated via a graphical interface, with its path planned using the open-source ROS (robot operating system) platform. Users can teach the cobot actions and drag-and-drop these to create a sequence of movements.
The third new technology is a development of a lightweight arm inspired by an elephant’s trunk that Festo first demonstrated in 2010. A new skin, made from a 3D knitted textile fabric, allows the BionicMotionRobot to apply a considerable force and to carry loads weighing up to 3kg. A newly developed optical sensor running along the length of the arm detects its position. Because the BionicMotionRobot has more degrees of freedom and is more complex than the BionicCobot, it is less accurate – about 1cm at the tool centre-point – but Dr Elias Knubber, head of Festo’s corporate bionic projects, points out that in many potential applications, precision is not vital.

According to Knubber, three of the biggest attractions of the pneumatic robot technologies are their compliant behaviour, adjustable stiffness and inherent safety, which could make them attractive for use near humans. He points out that conventional gripper technologies, in particular, can be hazardous and that the soft silicone OctopusGripper should be safer.
Festo emphasises that these technologies are being demonstrated as concepts and there are no immediate plans to commercialise them, although they may be used in pilot projects. “It should be possible to make them quite cheaply because the drives are quite simple,” Knubben says.